
 Tipos de mecanismos:
Tipos de mecanismos:
- Transmisión lineal
- Transmisión circular
- Transformación del movimiento lineal-circular
- Transformación de movimiento circular-alternativo
Las máquinas simples son artefactos que transmiten movimientos o fuerzas. Algunas máquinas son capaces de multiplicar la fuerza que se les aplica (palanca, polipasto,…) o de aumentar el desplazamiento que se aplica inicialmente (bicicletas,…).
Las máquinas intercambian fuerza con desplazamiento, si una máquina disminuye la fuerza necesaria para mover un objeto, hará que aumente el desplazamiento que se aplica y viceversa
Transmisión lineal
Palanca
Palanca:es una máquina simple que consiste en una barra o varilla rígida que puede girar sobre un punto fijo denominado fulcro o punto de apoyo.

Palanca de 1er grado: El punto de apoyo se encuentra en la parte central (columpio, alicate, balanza,…)
 Palanca de 2o grado: La carga se encuentra en la parte central (carretilla, cascanueces,…)
Palanca de 2o grado: La carga se encuentra en la parte central (carretilla, cascanueces,…)
 Palanca de 3er grado: La fuerza se aplica en la parte central (caña de pescar, pinza, …)
Palanca de 3er grado: La fuerza se aplica en la parte central (caña de pescar, pinza, …)

LEY DE LA PALANCA

F.f=r.R
Consecuencias: cuanto más largo sea el brazo de fuerza (f) respecto al brazo de carga (r) menos fuerza (F) se necesita para elevar la carga (R). Por contra para elevar la carga una distancia, el brazo de fuerza tendrá que recorrer una distancia mayor (se intercambia fuerza por desplazamiento)
http://platea.pntic.mec.es/dlopez/mecanismos/palanca.html
Polea simple:
 Es una rueda ranurada que gira entorno a un eje, por la ranura pasa una cuerda para elevar una carga.
Es una rueda ranurada que gira entorno a un eje, por la ranura pasa una cuerda para elevar una carga.
La polea simple no cambia la cantidad de fuerza necesaria para mover la carga R. Solo cambia el sentido de la fuerza. F = R
Nos permite elevar objetos sin tener que desplazarnos
Polea doble:
se trata de una polea fija y otra móvil que sujeta la carga. Con esta polea se necesita la mitad de fuerza para elevar la carga F = R/2.
Al necesitar la mitad de fuerza se requiere el doble de desplazamiento de cuerda para elevar la carga, es decir, si queremos elevar la carga 1 m necesitamos tirar de la cuerda 2 m.
L=2h siendo h la altura que queremos elevar la carga


Polipasto o aparejos:
Son parejas de poleas fijas y móviles. La fuerza para elevar la carga se reduce a la mitad por cada polea móvil del polipasto. F = R/2n siendo n el número de poleas móviles.

2 poleas móviles reducen la fuerza en 4 (F=R/2.n F=R/2.2 F=R/4), por lo tanto aumenta en 4 la cantidad de
cuerda que tenemos que recoger para desplazar la carga
(L=2.n.h L=2.2.h L=4.h para elevar la carga 1 m tenemos que tirar de 4 m de cuerda)

4 poleas fijas + 4 poleas móviles F=R/8 L=8.h
4 poleas móviles reducen la fuerza en 8 (F=R/2.n F=R/2.3 F=R/6), por lo tanto aumenta en 8 la cantidad de cabo que tenemos que recoger para desplazar la carga
(L=2.n.h L=2.4.h L=8.h para elevar la carga 1 m tenemos que tirar de 8 m de cabo)
Transmisión circular
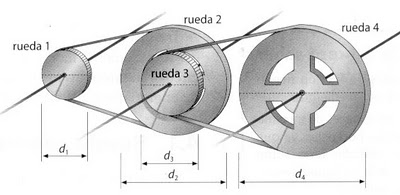
RUEDAS DE FRICCION

– El mecanismo consiste en dos o más ruedas que están en contacto.
– Por efecto del rozamiento, si una rueda inicia el movimiento (rueda motriz o conductora) la otra también gira (rueda receptora o conducida).
Cálculo de la velocidad de giro n1.d1=n2.d2 siendo n1 y n2 las velocidades de giro de las ruedas y d1 y d2 los diámetros de las ruedas
– En este caso los sentidos de giro de las ruedas son inversos.
– Si las ruedas tienen distintos diámetros la más pequeña girará más rápido y la más grande girará más lento
– El principal inconveniente es que no pueden transmitir mucha potencia porque patinan.
RELACIÓN DE TRANSMISIÓN (i)
Nos da la relación entre la velocidad salida y la velocidad de entrada. Matemáticamente se define como
![]()
N1, N2, velocidades, D1, D2, diámetros de las ruedas o poleas
Si i>1 el sistema es multiplicador (la velocidad de salida en mayor que la de entrada). Ocurre cuando la polea de salida es más pequeña que la de entrada D2<D1.
Si i=1 el sistema no cambia la velocidad (velocidad de salida igual a la de entrada. Ambas poleas son iguales D2=D1.
Si i<1 el sistema es reductor (la velocidad de salida es menor que la de entrada). Ocurre cuando la polea de salida es más grande que la de entrada D2>D1.
Poleas con correa:
 – El mecanismo consiste en dos o más POLEAS que están unidas por una o más correas.
– El mecanismo consiste en dos o más POLEAS que están unidas por una o más correas.
– Por efecto del rozamiento, si una polea inicia el movimiento, polea motriz o conductora, la otra también gira, polea receptora o conducida.
– Los sentidos de giro de las poleas son iguales.
– Si las poleas tienen distintos diámetros la más pequeña girará más rápido y la más grande más lento
– La transmisión de movimientos entre dos ejes mediante poleas está en función de los diámetros de estas, cumpliéndose en todo momento:
D1.N1 = D2.N2
D1 Diámetro de la polea conductora
D2 Diámetro de la polea conducida
N1 Velocidad de giro de la Polea Conductora
N2 Velocidad de giro de la Polea Conducida
 Relación de transmisión (i)
Relación de transmisión (i)


Tren de poleas
El elemento principal de este mecanismo es la polea doble, que consiste en dos poleas de diámetros diferentes unidas entre sí de manera que ambas giran solidarias. Solamente las poleas situadas sobre los ejes extremos (el conectado al motor y el conectado a la carga) giran solidarias con ellos.

fuente: http://concurso.cnice.mec.es/
En este caso N6= (D1.D3.D5/D2.D4.D6).N1
La relación de transmisión viene dada por
i=(D1.D3.D5/D2.D4.D6) por lo tanto N6=i.N1
En este caso N4= (D1.D3/D2.D4).N1
La relación de transmisión viene dada por i=(D1.D3/D2.D4)
por lo tanto N4 = i.N1
Engranajes

engranajes
– Son ruedas que poseen salientes denominados dientes.
– Los dientes encajan entre sí, de modo que si un engranaje gira (motriz o de entrada) arrastra al otro (conducido o de salida).
– El giro se invierte de un engranaje a otro.
Transmiten mucha potencia sin patinar (cajas de cambios, gruas, elevadores, …)

Maquinaria de un reloj
– También se usan en relojes, pues al no patinar hacen que los giros sean muy precisos.
Ecuación de equilibrio y relación de transmisión (i)
Al igual que con las ruedas de fricción, hay una relación matemática entre las velocidades de los engranajes (N) y el número de dientes (Z)
N1.Z1 = N2.Z2
siendo N1 y N2 las velocidades de los engranajes
Z1 y Z2 el número de diente de los engranajes
La relación de transmisión se expresa con
i = N2/N1 = Z1/Z2
Tren de engranajes

Formado por engranajes simples y dobles, transmiten el movimiento del primer engranaje al último.
Para 4 engranajes la relación de transmisión se determina por i=(Z1.Z3)/(Z2.Z4)
N4=i.N1

i = 60×40/(12×20) = 10 sistema multiplicador, el último engranaje gira 10 veces más rápido que el primero.
N4=i.N1, N4=10×400 = 4000 rpm

i =10×10/(20×40) = 1/8 sistema reductor, el último engranaje gira 8 veces más lento que el primero. Si N1= 1600 rpm N4=i.N1, N4=1/8×1600 = 200 rpm
Tipos de engranajes

 – los engranajes helicoidales y cónicos permiten cambiar el eje de giro
– los engranajes helicoidales y cónicos permiten cambiar el eje de giro
Engranaje con cadena

– El mecanismo consiste en dos o más engranajes que están unidas por una cadena o correa dentada.
– En este caso los sentidos de giro son iguales.
– La cadena permite transmitir mucha potencia y movimiento a cierta distancia (motos, bicicletas, excavadoras,…)
– Si los engranajes tienen distintos número de dientes, el de menos dientes girará más rápido.
 |
 |
Trasnformación movimiento circular-lineal
Piñón-cremallera
– Compuesto por un piñón y una barra dentada (cremallera).
– Al girar el piñón hace que la cremallera se mueva en línea recta.


– Se usa en la dirección de los coches, en trenes de cremallera (funicular), …
Transformación movimiento alternativo
Manivela:

Es una barra acodada provista de una empuñadura que convierte el movimiento circular en rectilíneo, transmite la rotación al eje sobre el que actúa. Cumple con la ley de la palanca. F.f=r.R
Biela-manivela
 – Formado por una manivela y una biela.
– Formado por una manivela y una biela.

– La biela hace dos movimientos diferentes en cada extremo, por un lado gira siguiendo la manivela y por el otro se mueve en línea recta de forma alternativa siguiendo la guía.
Cigüeñales y bielas:
Cigüeñal
– Si se disponen varios sistemas biela – manivela conectados a un eje común, se forma un cigüeñal.

Un cigüeñal actúa igual que una manivela, está provisto de uno o varios codos que giran.
La biela es una varilla perforada que se adapta a codo del cigüeñal .
Cigüeñal con tres codos y tres bielas
– Al girar el cigüeñal las bielas giran por un extremo y se desplazan en línea recta por el otro extremo.
el cigüeñal las bielas giran por un extremo y se desplazan en línea recta por el otro extremo.
Excéntrica
– Es un disco circular que gira entorno a un punto situado fuera del centro.
– Se llama excentricidad a la distancia entre el eje de giro y el centro de la excéntrica
– La excéntrica se encajada a un eje motriz en un punto que no coincide con el centro. El elemento seguidor está permanentemente en contacto con la excéntrica gracias a la acción de un muelle.
– De este modo, el giro del eje hace que el perfil o contorno de la excéntrica toque, mueva o empuje al seguidor.
Leva

– Se compone de una leva (rueda con un saliente) y un seguidor que está permanentemente en contacto con la leva gracias a la acción de un muelle..
– La leva recibe el movimiento rotativo a través del eje motriz, de este modo, el giro del eje hace que el perfil o contorno de la leva toque, mueva o empuje al seguidor.
– El alzado es el desplazamiento máximo que sufre la varilla o seguidor.
Pingback: Mecanismos | Blog de Aula de Pantaleón Hernández Rodríguez
Muy completa la entrada,
saludos,
Pantaleón Hdez.
Muy bueno el blog, pero quisiera hacer algunas preguntas como:
1_ si tengo una fuerza o empuje de 100 toneladas con un recorrido de , 2,5mtrs (lineal en seis horas) , cual será el tamaño de la piñoneria, para generar 1500rpm y cuánto kva se puede generar